|
Introduction A UGV is essentially an evolution in combat technology that will have a large scale impact on the way future wars will be planned, fought and won. The deployment of UGVs will not only protect trained human lives in dangerous battlefield situations but also a variety of potential UGV applications for military operations can significantly increase mission performance, enhance combat effectiveness, and ensure personnel safety. The deployment of UGVs enable standoff operations and thereby reduce or remove operator risks in highly stressful and dangerous environments, such as active minefields and areas of explosives or Chemical, Biological, Radiological and Nuclear (CBRN) hazards. The diverse operational roles a UGV can perform include active combat roles, operations in dangerous or contaminated environments (mine fields and nuclear-biological– chemical-contaminated areas), disposal of UneXploded Ordnances (UXO) and Improvised Explosive Devices (IEDs), utility and logistic support roles, etc. Mission Unmanned Tracked (MUNTRA). CVRDE took up the prestigious UGV project ‘Conversion of BMP-II into Tele-operated and Autonomous Vehicle’ during 2007. The project was subsequently named as Mission UNmanned TRAcked (project “MUNTRA”). The objective of this project was to convert three BMPII classes of tracked amphibious vehicles into teleoperated/autonomous UGV platforms and to implement payloads for unmanned missions of surveillance, NBC reconnaissance and mine detection/marking missions. The system configuration consists of three UGVs (one for each of the payload missions) and one base vehicle. The developed UGVs are named as MUNTRA-S for unmanned surveillance missions, MUNTRA-N for unmanned NBC reconnaissance missions and MUNTRA-M for unmanned mine detection/marking missions. The base vehicle is MUNTRA-B, from which the UGVs are teleoperated through wireless communication links. Salient Features of the MUNTRA-B (Base Vehicle)
CVRDE has developed a range of stateof- the-art UGV technologies, systems and integration/evaluation methodologies during this project. The intended terrain of deployment of the UGVs is the hot and dry desert terrains of the north western regions of country.  Base Vehicle The base vehicle (MUNTRA-B) is a BMP-II platform to match the cross country performance of the UGVs. All the three UGVs (but currently one at a time) are tele-operated from the base vehicle. The operation is planned in such a way that both the base vehicle and the UGV are driven manually to the point of deployment. Then the control of UGV is switched to tele-operated mode from the base vehicle and thereafter it is teleoperated by the operator from the base vehicle. Throughout the mission, the base vehicle is static and the UGV is mobile. To ensure that the communication link is always maintained, the antennae are mounted on a GPS based tracking system in the base vehicle. 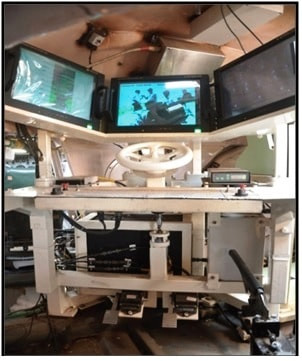 Major Systems of MUNTRA UGV Each of the three MUNTRA UGVs has a DBW and tele-operation system to enable mobility through teleoperation. In addition, each of the three UGVs has a specific payload to carry out its intended mission. There are seven major systems in the MUNTRA UGVs. CVRDE has designed, developed, integrated and validated these seven major modules on the BMPII vehicles to convert them into self contained UGV platforms. Drive-by-Wire This core technology involves conversion of the manually operated driver’s controls (acceleration, brake, steering, etc), into electronically operated controls, thus enabling teleoperation of the vehicle. This technology is primarily the design of EMAs for each of the driver’s controls, their integration within the driver/engine compartment of the BMP vehicle and the control through software. After the initial verification trials in CVRDE, this new technology was validated by tele-operating the MUNTRA-S during the summer field trials at Mahajan Field Firing Ranges (MFFR), Rajasthan during May 2012, where the temperature touched 52 0C. Subsequently, the system was also integrated on two more BMP vehicles (MUNTRA-N and MUNTRA-M), which were also validated through field trials. Subsequently, the DBW systems in all the three UGVs were operated successfully during various summer/ winter trials. This is the first trial evaluated DBW system developed in India for the BMP-II class of tracked vehicles. 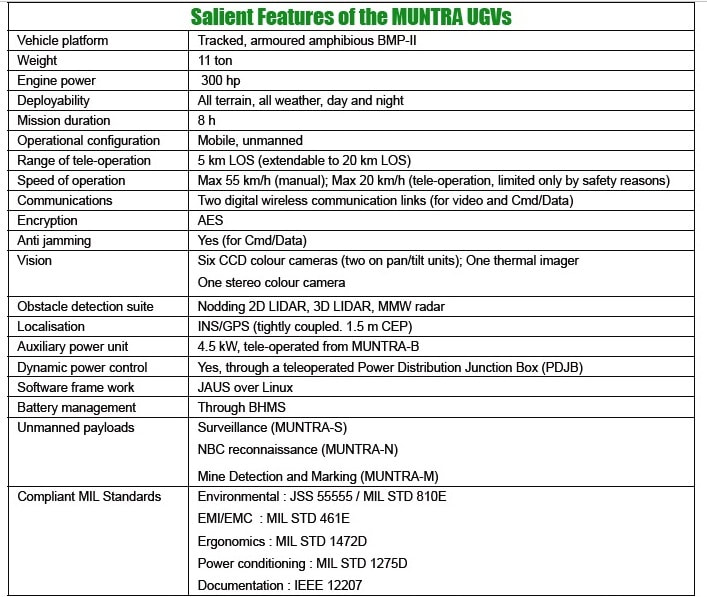 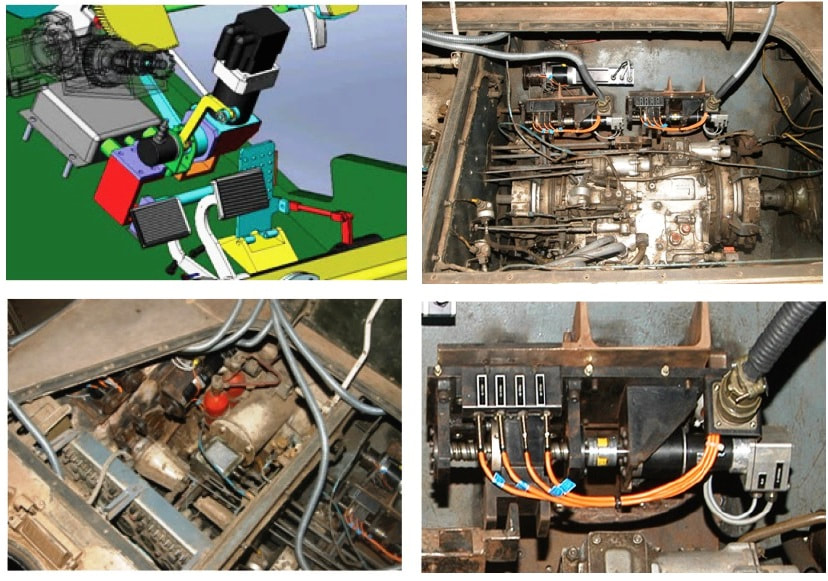 Tele-operation Module The tele-operation system (along with DBW system) forms the core of UGV. During the project, various stateof- the-art technologies and sub-systems were designed and developed for the teleoperation system. The tele-operation system was integrated in the BMP vehicles and was successfully validated during numerous summer/winter trials at MFFR during the period 2012-2014. This is the first time in India that a UGV of this class was tele-operated under actual field conditions. 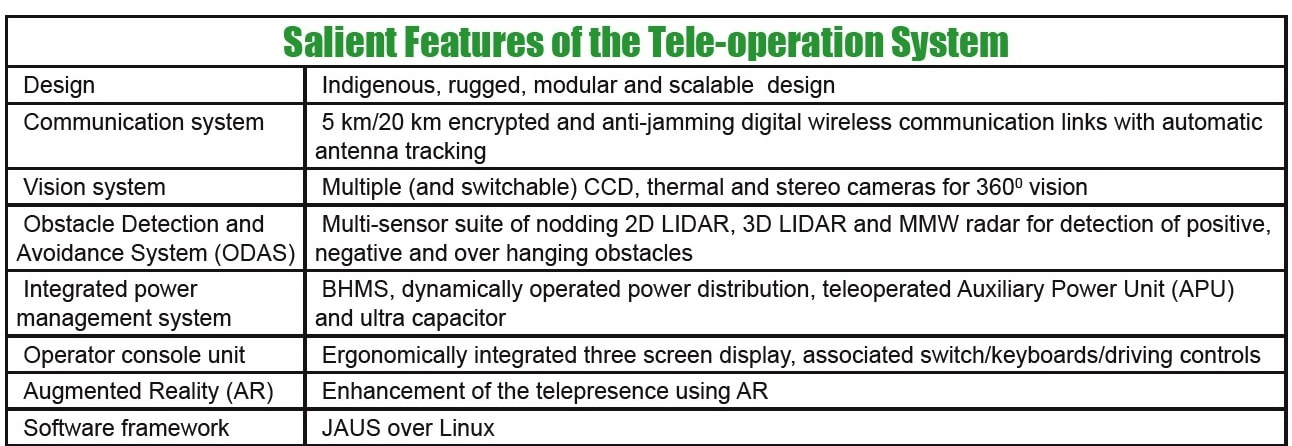 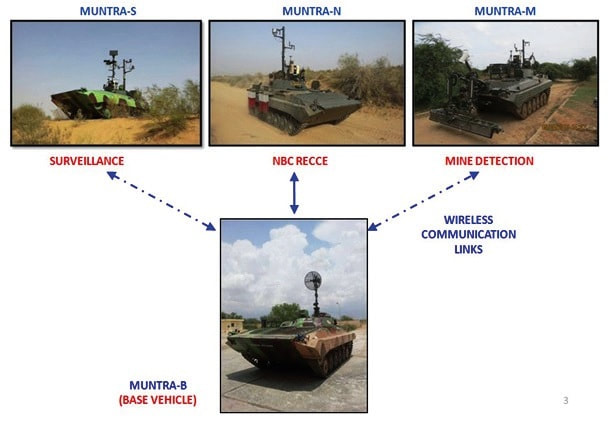 Surveillance Payload This payload is integrated on the MUNTRA-S UGV and is meant to carry out unmanned surveillance operations. Ground and sea targets upto 18 km can be detected and tracked. MUNTRA-S is configured for unmanned surveillance missions using a suite of surveillance sensors, consisting of Battlefield Surveillance Radar-Short Range (BFSRSR) radar and an integrated electrooptics (with CCD/TI/LRF) mounted on a retractable carbon composite lightweight mast. Using this payload, a single operator can carry out the surveillance upto a range of 18 km under all weather, day/ night conditions. The full range of the collected surveillance data is transmitted to the base vehicle, where it is displayed for the information of the operator. The innovative feature in the design is the automatic slaving of the electro-optics to the radar for the visual confirmation of the target detected by the radar. The surveillance payload was successfully validated during the field trials conducted at MFFR during the summer of 2012. 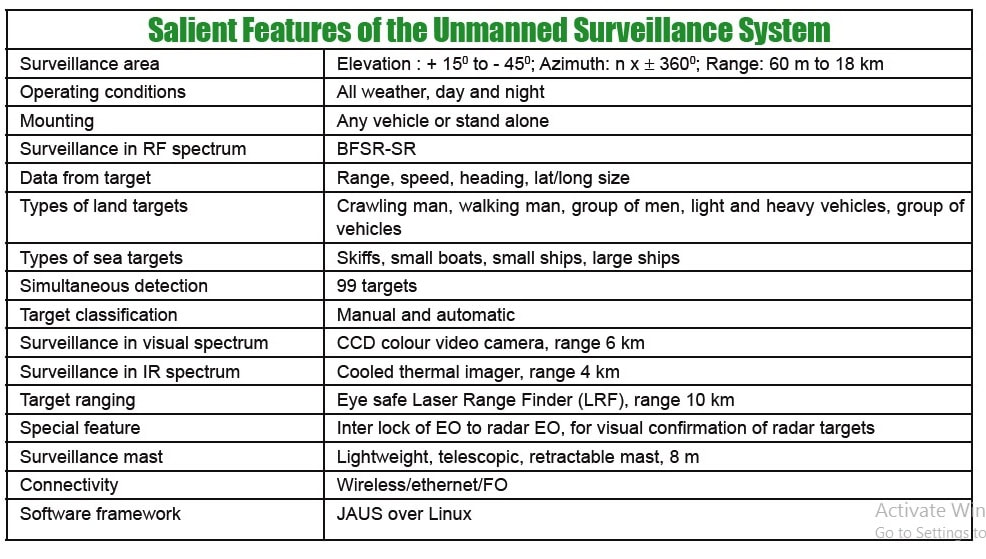 NBC Reconnaissance Payload This payload is implemented on the MUNTRA-N UGV, which is meant for unmanned NBC reconnaissance operations. The NBC reconnaissance payload is mounted on the MUNTRA-N and is teleoperated from the base vehicle MUNTRA-B, and is intended to carry out unmanned reconnaissance missions in NBC contaminated areas. The primary NBC detectors are the nuclear radiation detector, a Chemical Warfare Agent/Toxic Industrial Chemical (CWA/TIC) detector and a Biological Agent (BA) detector. The full range of the collected NBC data is transmitted to the base vehicle MUNTRA-B, where it is displayed for the information of the operator. The MUNTRA-N was successfully trial evaluated at MFFR during summer of 2014.  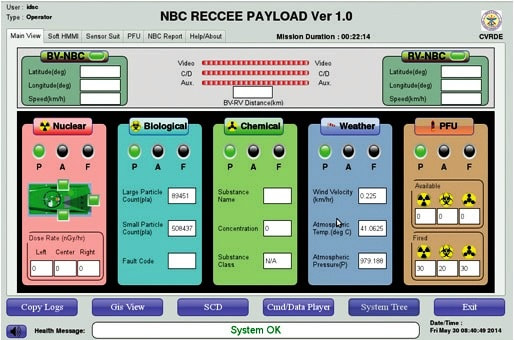 Mine Detection Payload This payload is implemented on the MUNTRA-M UGV, which is meant for unmanned mine detection and marking missions. The primary mine detection sensor is the Ground Penetrating Radar (GPR) and the confirmation is given by the Vapor Detection System (VDS). The GPR is mounted on two six-axis parallel manipulator arms and the VDS is carried by a five-axis manipulator arm. Once the mine is detected by the GPR, the vehicle is automatically stopped. Then, the mine will be confirmed by the deployment of the VDS. Once the mine is confirmed, its location will be automatically marked by using paint spray as well as will be marked in the GUI in the base vehicle. The mine detection system can be tele-operated from the base vehicle MUNTRA-B or manually operated from MUNTRA-M. The deployment of the MUNTRA-M is also shown. The processed GPR data is transmitted to the base vehicle for the visualisation of the mine by the base vehicle operator. This data includes information about the depth, size and position of the detected mine-like object. The development of a real time algorithm for detecting the buried mines within 200 ms while the vehicle is on the move and stopping the UGV on detection is a significant achievement by CVRDE. The real time algorithm was developed by combining many detection techniques like clutter removal, parabola estimation, feature extraction and classification, etc.  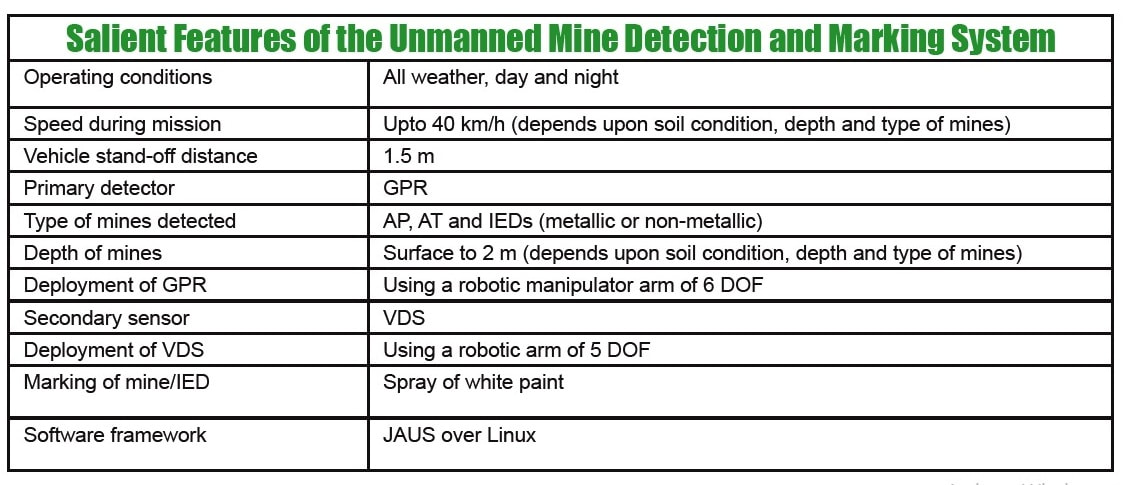 Autonomous Navigation Module Autonomous Navigation System (ANS) is a cutting-edge technology for the autonomous navigation of vehicles. This module provides a limited autonomous navigation capability to the UGV. Based on a given sequence of GPS way points, the vehicle automatically navigates from the start location to the destination location by following all the defined GPS way points in between. It also has the capability to detect and avoid obstacles in the path. The crux of the ANS is the path planning algorithms, efficiency and execution speed. Thus two types of path planning are used in ANS: the global path planning and the local path planning. The global path planning involves the generation of alternate paths between the GPS way points. The optimum path is then selected based on a cost map, which is essentially the degree of difficulty of each path. The local path planning is used to avoid obstacles in the path and get the UGV back to the planned path. The detection of the obstacles is done using a sensor suite on the vehicle, consisting of 2D and 3D LIDARs. The LIDARs give the location of the obstacles with respect to the vehicle. Based on the size of the obstacle and the safe region defined around each obstacle, an alternate path is planned by the local path planning algorithm. Once the obstacle is avoided, the vehicle moves back into the pre-planned path given by the global path planner. For the ANS, the software was developed by CAIR and the hardware was developed by CVRDE. The vehicle navigation commands (steering, accelerator, brake, etc.) was generated by the ANS software and forwarded to the DBW controller. The DBW controller finally controls the vehicle driving system (steering, accelerator, brake, etc.) through a set of EMAs. The feedback from the DBW controller and from the localization sensors is used for the closed loop control of the vehicle to ensure that it follows the specified GPS way points. Various obstacle detection strategies and navigation algorithms were developed and implemented for the ANS module. Integration, testing and demonstration of the autonomous navigation system on MUNTRA-S were successfully completed in June 2014 at MFFR.  Electronically Controlled Powerpack The existing BMP-II vehicle is fitted with a 300 hp (UTD-20) powerpack with manual transmission and steering system. For this UGV project, the interface to the engine was through the EMAs attached to the vehicle driving controls (steering, accelerator, brake, etc.). This introduces latency in the response of the UGV. To overcome this latency, a direct electronic interface to the engine/transmission is necessary. Therefore, a 400 hp powerpack engine and transmission) was specially designed and developed to meet this requirementof the MUNTRA project. This Electronically Controlled Power Pack (ECPP) can be directly controlled by appropriate electronic signals, without the intervening need for an electromechanical DBW system. Along with the 400 hp powerpack (with electronically controlled engine, automatic transmission and brake system) the required auxiliaries (viz. cooling system, air filtration system, etc.) were also developed.All these systems have to be mounted within the existing engine compartment. The mobility criterion of the existing vehicle is to be retained in this upgraded system. The upgraded system is electronically interfaced by means of a Main Controller Unit (MCU) with engine control unit and transmission control unit. The systems interact with each other on a J1939 protocol wherein all control commands, system health checks, interlocks and diagnostics data are interfaced. The MCU interfaced with a telemetry system for wireless control of the powerpack. A GUI is provided for the operator to monitor and operate the system. A number of technical difficulties were overcome by CVRDE during the realisation of this powerpack. This is the first electronically controlled powerpack of this class in India. The 400 hp ECPP was integrated in a BMP-II vehicle and was extensively field validated at MFFR during November- December 2015. During the successful field validation of the 400 hp CPP, it was found the response and the handling characteristics of the vehicle were better as compared to a manually operated BMP-II vehicle. 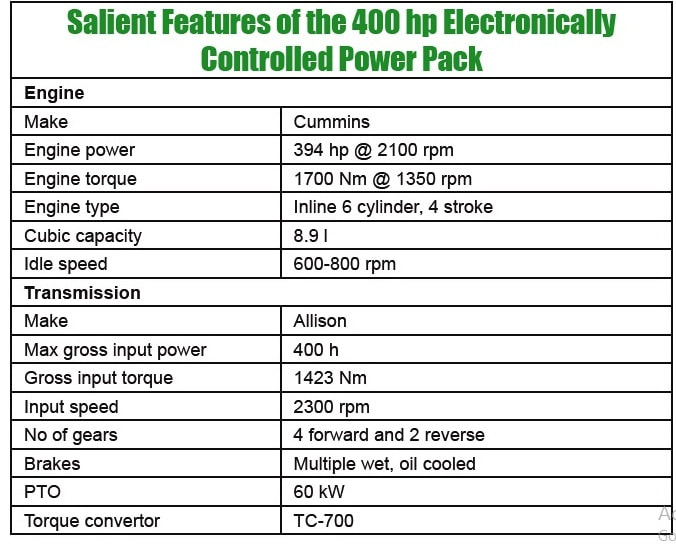 Demonstration and User Field Trials The MUNTRA-S and MUNTRA-B were demonstrated during the prestigious Defence Expo-2012 at New Delhi. Various dignitaries and other eminent visitors appreciated the concept and the implementation of UGVs. As a spinoff effort, in association with the Dte of LIC (DRDO HQ), a demonstration of the capabilities of MUNTRA-S and MUNTRA-M were given to the Central Armed Police Forces (CAPF) under the Ministry of Home Affairs (MHA) during May 2015. The requirements of the CAPF/ MHA in the domains of surveillance and mine/IED detection were discussed during the demonstration. Based on the requirements of the CAPF/MHA, an extensive six months user trials were carried out by the MHA to assess the suitability of the Unmanned Surveillance System (USS) for coastal surveillance applications. This intensive user trial was conducted by the Central Industrial Security Force (CISF) at the Chennai Port Trust (ChPT) from 01 August 2016 to 30 January 2017. During the user trial, the USS was extensively used by the CISF 24x7 for the surveillance of sea shore and sea based targets. Various targets on the sea were detected and cracked by the CISF upto a range of 18 km during this user trial. At the end of the trial, the MHA/CISF has stated that the USS is extremely useful for them and is very effective for surveillance of large areas with minimum manpower requirements. Based on the user requirements, CVRDE has also mounted the USS on a movable trolley for easy and quick deployment. Further follow-up is being taken up with the MHA through the Dte of LIC in this regard. 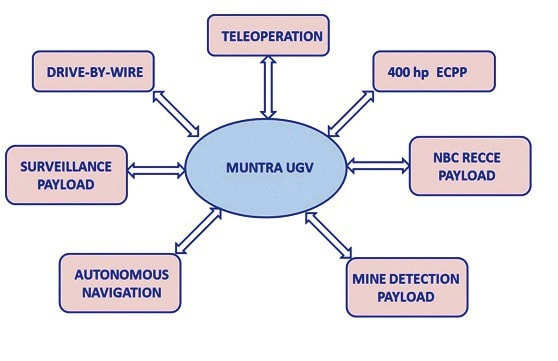 Future: Development of an Unmanned Combat Ground Vehicle The Unmanned Combat Ground Vehicle (UCGV) is an unmanned ground vehicle with a suite of remotely operated weapons (current international conventions do not permit the use of autonomous weapons, even though the technology is readily available). The deployment of UCGVs will greatly enhance the battlefield effectiveness and generate force-multiplier effects. It is projected that in the immediate future, the role of humans will be greatly reduced in the war front and the actual fighting will be done by UCGVs and similar machines. As a proactive measure, CVRDE has drawn up future plans for the design and development of a tracked UCGV in a progressive manner through three phases. The first two phases will develop a UCGV on the existing BMP-II tracked vehicles. The weapons systems shall include a Remote Controlled Weapons Station (RCWS), a soft kill Active Protection System (APS) and a medium power Directed Energy Weapon (DEW) system. A new high speed tracked vehicle platform shall be specifically developed for the new UCGV in the third phase. In addition to the RCWS with enhanced fire power, this new UCGV is expected to have a hard kill APS, high power DEW, SAMs, attitude control system and active camouflage.  UGV Roadmap for CVRDE Though the current technologies are based on tele-operation and limited autonomy, the technologies developed by CVRDE can be extended further for the development of UGVs capable of undertaking more complex missions in dynamic and uncertain battlefield scenarios. Based on the future battlefield scenarios and the increasing pace of technological developments, it is projected that UGV technologies will move from the current tele-operated UGVs to fully autonomous networkcentric UGVs by 2050. Accordingly, the UGV developments in CVRDE will also migrate to more evolved UGVs capable of complex missions in uncertain battlefield conditions. The missions undertaken by the UGV will also shift from a passive logistics/ support role to highly active weaponised combat missions. Combat UGVs will initially have only defensive capabilities, but will rapidly evolve into a potent platform for offensive military perations deep inside the enemy territory. The future road map for UGV developments in CVRDE is also shown. Significant spinoff developments for internal security applications will also be part of the roadmap. Current systems use varying combinations of tele-operation and assisted autonomy for the systems to follow pre-defined routes, automatically detecting and avoiding obstacles along that route. Future UGV applications will require the development of more powerful technologies for autonomous navigation, starting in the near term with refinement of leader-follower technologies completely autonomous operations in unstructed terrains and harsh environmental conditions. Also, advances in machine learning is essentialto reduce the cognitive burden on operators, enhance efficiency of machinehuman interactions, and enable more advanced operations, such as manned and unmanned teaming. Other key technology focus areas include the enhancement of high-mobility and all-terrain attributes; continued development of power train and battery technologies to support increased endurance; navigation and timing technologies that do not rely on spacebased signals; secure communications under NLOS conditions; automatic target classification, tracking and engagement; and operations in swarms. As the future battles will be fought predominantly by unmanned or a by a composite collaborative teams of mannedunmanned systems, countries with technological competence in this very critical field will decide the outcome of all such future armed conflicts. Faced with potentially hostile situations both inside and outside our country ranging from a fully fledged war to low intensity conflicts, CVRDE/DRDO should rigorously pursue a long term plan for the development and deployment of UGVs to guard our borders and to make our country self-sufficient in this very critical technological domain. 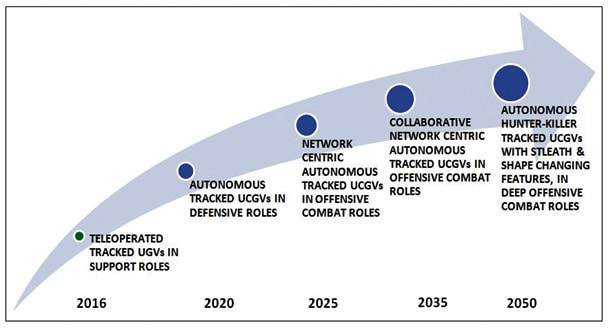 |
AuthorPalash Choudhari
Categories |
 RSS Feed
RSS Feed
