|
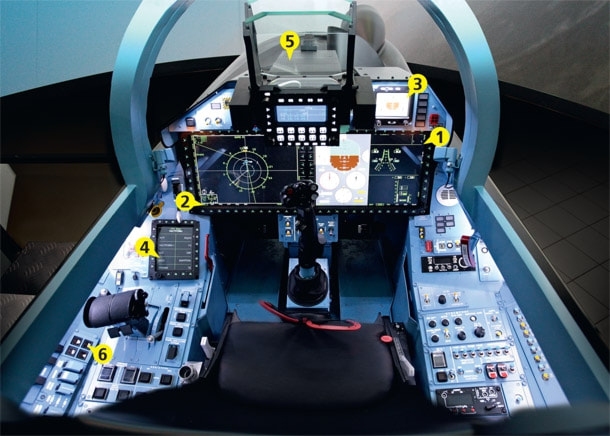
In 2003, Sukhoi launched a project to produce a fighter to bridge the gap between upgraded variants of the Su-27 and Su-30MK, and Russia's fifth-generation Sukhoi PAK FA. And the result was Su-35. Su 35 is a 4++ generation aircraft. The Sukhoi Su-35 Flanker-E is the top Russian air-superiority fighter in service today, and represents the pinnacle of fourth-generation jet fighter design. It will remain so until Russia succeeds in bringing its fifth-generation PAK-FA stealth fighter into production. Distinguished by its unrivaled maneuverability, most of the Su-35’s electronics and weapons capabilities have caught up with those of Western equivalents.  Air-frame Su 35 is a considerably modified Su-27 fighter. the fighter got an improved airframe, which dramatically increased its service life to 6,000 hours, 30 years of operation (the time before the first test and recondition and the between-repairs period has been increased to 1,500 hours, or 10 years of operation). The reinforced airframe sees extensive use of titanium alloys. The reduced weight raised the maximum takeoff weight to 34.5 tonnes. The aft-cockpit avionics bay was shortened, and the remaining volume now houses an extra fuel cell. The upper surface of the fuselage centre section lacks the air brake, with his job now being handled by differentially operated rudders. The rudders were enlarged and now have the vertical trailing edge, while the tail tips are made of metal. The central and side tail booms have extra room to house fuel. The fuel load grew by more than 2 t, totalling 11,500 kg. In addition, the Su-35 is the first in the Flanker family able to carry two drop tanks 2,000 litres each. Another first for the aircraft of the type is the Aerosila TA14-130-35 gas-turbine auxiliary power unit (APU). The fighter also has an integral oxygen generation unit to enhance its self-contained operation capabilities. Aerodynamically it is similar to the Su-27. But unlike the Su-30MKI it will feature no canard fins. Technological advancements have produced more compact and lighter hardware, thus shifting the centre of gravity to the aircraft's rear. These improvements removed the need for canards and saw the abandonment of the "tandem triplane" featured on several Su-27 derivatives. Other aerodynamic refinements include a height reduction of the vertical stabilizers, a smaller aft-cockpit hump. Among the Su-35 design features, worthy of note is the absence of an overhead brake flap, a standard characteristic of the Su-27. Its functions are performed by an active rudder. The Su-35 chassis has been reinforced because of the increased takeoff and landing weight of the aircraft. For the same reason, the front bearing has two wheels. The intakes of the engines are larger to allow a better flow of air, flaperons are large and the tail sting is smaller. The fuselage has better aerodynamics and lifting ability in general. Wrapping up this outline of the basic airframe modifications, mention should be made of the total revamping of numerous antennas on the fuselage, wings and empennage due to the introduction of advanced avionics. The fighter carries a radically advanced digital integrated quadruple-redundant control system KSU-35 from Avionika company. It allows both manual and automatic control of the aircraft in all axes, ensures the fighter’s stability, controllability and centre of gravity, controls the swiveling nozzles, ensures super-maneuverability, flight conditions constrains, aircraft control while on the ground, and wheel braking.  Cockpit The cockpit of the Su-35 is one of the most advanced in the world. The core of the Su-35 cockpit instrumentation suite are two full-color multi-function liquid crystal displays of MFI type, a multi-function panel with a built-in display processor, a wide angle collimatory display on the windshield and a control and indication panel. MFI multi-function displays with a built-in processor measure 9 x 12 inches (diagonal 15 inches) and have a resolution of 1400x1050 pixels. They are intended for reception, processing and production, in a multiple window mode, of graphic, numeric, alphabetic and symbolic information. They also present televised information received from onboard TV sensors and impose on it synthesized numeric, alphabetic and symbolic information. Besides, they produce and send video signals in a digital format to the video record unit. The multi-function panel with a built-in display processor presents the required information and issues commands by pushing the buttons on the button array at any time in flight. The airborne collimatory display with a built-in processor monitors the space beyond the cockpit. The information is processed by control signals. The collimator angle of view is 20x30о. The onboard systems and armament in the new cockpit of Su-35 are controlled by buttons and switches on the aircraft control joystick and engine control levers as well as by a button array on multi-function displays. Thus the HOTAS concept is realized on this type of aircraft. The LCD functions are to receive, process, and transmit data in various ways, whether these are graphics, numbers, TV images, etc.. They also produce and send video signals in digital format to the video recording unit. The HUD has a control panel and a viewing angle of 30 ° by 20º, and its the IKSh-1M. The control column of the engine and the control stick have HOTAS capability. The helmet has a built in sight (HMS) and a small display. All key system and weapon controls are on the stick and throttles in line with the HOTAS concept. There is a helmet-mounted target designator at the pilot’s disposal. To reduce the workload on the pilot, his information support involves the so-called ‘dark cockpit’ approach, with prompting messages issued to him in an emergency only. Piloting and navigating are made much easier owing to a precision laser strapdown inertial/satellite navigation system, digital moving terrain map and radio-technical navaids. Cockpit Details
 Central Stick
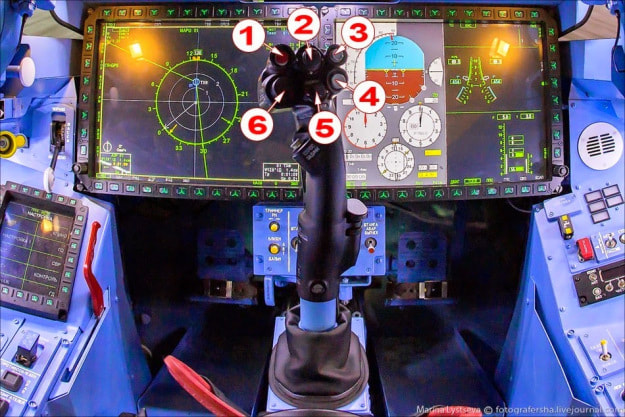 Engine Control levers
 Avionics The distinctive feature of Su-35 is the employment of a new suite of onboard instruments. Its core is the information management system (IMS), which integrates functional, logical, informational and software subsystems into a single complex that ensures the interaction between the crew and equipment. The IMS includes two central digital computers, commutation and information devices and an indication system built on the “all-glass cockpit” concept. The aircraft features many other upgrades to its avionics and electronic systems, including digital fly-by-wire flight-control system, and the pilot is equipped with a head-up display and night-vision goggles. The use of a new integrated control system (developed by MNPK Avionika) simultaneously performing functions of several systems – remote control, automatic control, limiting signals system, air signals system, chassis wheels braking system – will enhance the fighter’s handling capability and maneuverability. The hydrodynamic control actuators from the power system are replaced with electric ones this not only saves room and weight, but also helps introduce a parallel, remote guidance of the machine. In practice this means that the pilot's role becomes less conspicuous. That is, the computer decides at which speed and in which regime the machine will find its target and at which moment it will allow the pilot to use the weapons. Also, the fighter will perform a part of the complex piloting maneuvers, such as flying at low altitudes over the terrain, by itself. The electronics will make sure that the pilot uses the weapons in a safe manner for the machine or does not have the plane go off in an uncontrollable spin. The avionics include networking, with an ‘intraflight’ datalink, based on the 1990s TKS-2 series that can network 16 Flankers, but also a new ‘Link-16 type’ terminal, effectively a Russian ‘JTIDS-ski’, which equalises the wide area networking recently introduced in the West. Voice and data crypto modules are included. The navigation package includes a strap-down inertial system, with integrated satellite navigation, radio navaids, and a digital moving map system. Optical fibre and mux bus technology is used in the system.  Irbis E Radar This is a development V V Tikhomirov Research Institute of Instrument Production. In design, this is an X-waveband multi-role radar with a passive phased antenna array (PAA) mounted on a two-step hydraulic drive unit (in azimuth and roll). The antenna device scans by an electronically controlled beam in azimuth and angle of elevation in sectors not smaller than 60°. The two-step electro-hydraulic drive unit additionally turns the antenna by mechanic means to 60° in azimuth and 120° in roll. Thus, in using the electronic control and mechanical additional turn of the antenna, the maximum deflection angle of the beam grows to 120°. The Irbis-E is a direct evolution of the BARS design, but significantly more powerful. While the hybrid phased array antenna is retained, the noise figure is slightly worse at 3.5 dB, but the receiver has four rather than three discrete channels. The biggest change is in the EGSP-27 transmitter, where the single 7 kiloWatt peak power rated Chelnok TWT is replaced with a pair of 10 kiloWatt peak power rated Chelnok tubes, ganged to provide a total peak power rating of 20 kiloWatts. The radar is cited at an average power rating of 5 kiloWatts, with 2 kiloWatts CW rating for illumination. NIIP claim twice the bandwidth and improved frequency agility over the BARS, and better ECCM capability. The Irbis-E has new Solo-35.01 digital signal processor hardware and Solo-35.02 data processor, but retains receiver hardware, the master oscillator and exciter of the BARS. A prototype has been in flight test since late 2005. The performance increase in the Irbis-E is commensurate with the increased transmitter rating, and NIIP claim a detection range for a closing 3 square metre coaltitude target of 190 - 215 NMI (350-400 km), and the ability to detect a closing 0.01 square metre target at ~50 NMI (90 km). In Track While Scan (TWS) mode the radar can handle 30 targets simultaneously, and provide guidance for two simultaneous shots using a semi-active missile like the R-27 series, or eight simultaneous shots using an active missile like the RVV-AE/R-77 or ramjet RVV-AE-PD/R-77M. The Irbis-E was clearly designed to support the ramjet RVV-AE-PD/R-77M missile in BVR combat against reduced signature Western fighters. In terms of characteristics, the radar is similar to the one in the F-22. The Irbis can detect an approaching target 350-400 km away. At such a distance the fighter can see an aircraft carrier, at 150-200 km a railroad bridge, at 100-120 km a motorboat and at 60-70 km operative-tactical missile systems or groups of armored vehicles and tanks, and it can strike them all. The radar can also map the ground using a variety of modes, including the synthetic aperture mode. The Irbis-E is complemented by an OLS-35 optoelectronic targeting system that provides laser ranging, TV, Infra-red search and track (IRST) functionality. The Irbis is also resistant to electronic warfare. In air-to-surface mode the Irbis-E provides mapping allowing to attack four surface targets with precision-guided weapons while scanning the horizon searching for airborne threats that can be engaged using active radar homing missiles.It is one of the most powerful PESA radar used in an operational aircraft. The Irbis can do many functions without ever leaving to monitor the airspace, this means, it is able to monitor and track air and ground targets previously identified while looking for new targets at the same time. The system EKVS-E BTsVM SOLO 35 is responsible for the fire control. The Su-35 BM also has a radar in the tail, and for this function there are available the Phazotron NO12 and NO15 and Leninets VOO5 used in the Su-34. 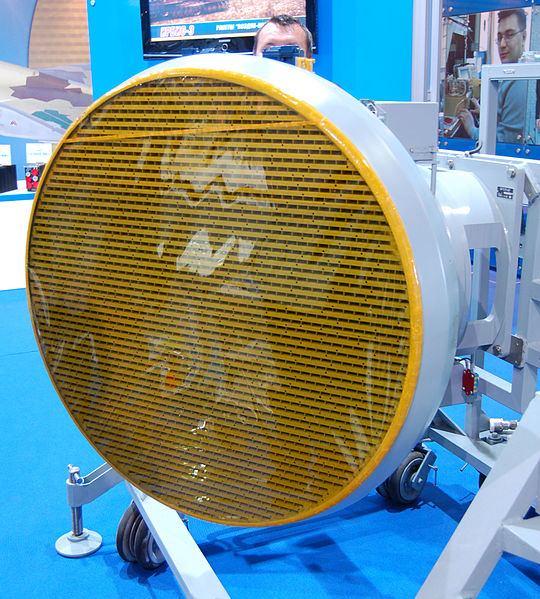 OLS – 35 The second information channel of the Su-35’s fire control system is the infrared search and track (IRST) sensor – uses targets’ IR signature to acquire and track them at a range of 90 km in the pursuit mode. The IRST ranges aerial and surface targets with its integral laser rangefinder at 20 km and 30 km respectively. In addition, the IRST can be used to paint ground targets for laser beam-riding missiles. Surveillance/targeting optronic pod will provide the fighter with even greater capabilities in the lookdown mode and in the navigation and piloting roles. The system also measures the distance to air targets up to 20km and ground targets up to 30km, it can monitor and follow up to 4 different air targets and can designate targets for laser guided missiles. OLS 35cdoes not only measure the distance to the target, but also create an invisible spot, which sees missiles and bombs with laser homing. The video image and information obtained through RL displayed on the HuD. Pilots see the target through a video camera and determine its angular co-ordinates and the laser measuers the distance. This information is transmit to the sighting system of Su 35, the on board computers calculates the required parameters to accurately hit the target. Su-35 resettled more perfect board ,NPK SEC Infrared warning of missile consists of six sensors located in the front part of the fuselage to provide all-aspect coverage. The system can capture the rocket launch MANPADS at a range of 10 km. Two sensors detect laser irradiation on boards placed in the forward fuselage. They can be found at a range of laser rangefinders 30 km. 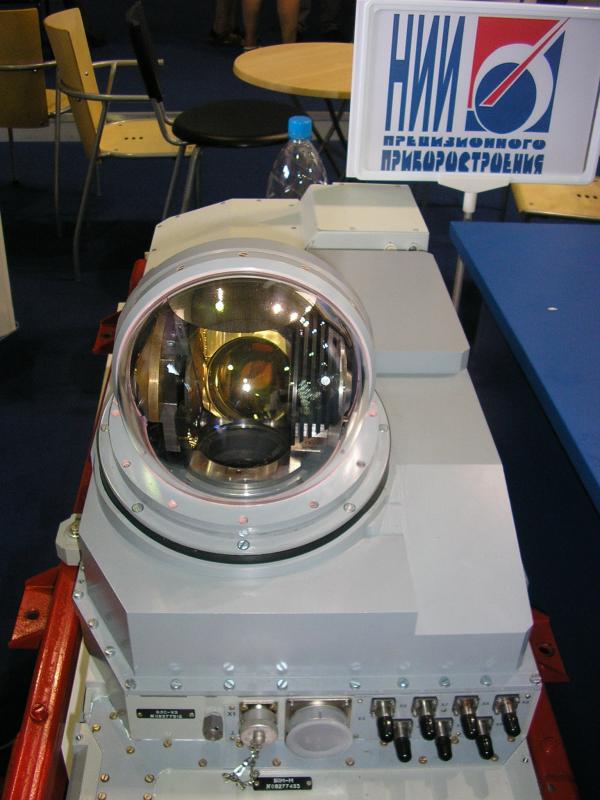 Navigation Among other new onboard systems of the Su-35 is modern navigation and radio communication equipment, systems maintaining fighters operation in a formation and a highly efficient electronic countermeasures suite. The component package of the latter and its complementation with specific jamming devices can be determined by the customer. The plane has 2 UHF radios and two VHF radios, voice and radio coding systems and Link-16 system to exchange data. All these elements as well as data from radar, IRST and pods are controlled by 2 modern computers that enable the processing and transmission of data to the pilot at crucial moments, easing its workload. The plane has sensory fusion. BINS-SP inertial/satellite navigation system The Su-35’s BINS-SP inertial/satellite navigation system was developed by the Moscow Institute of Electromechanics and Automation in cooperation with other members of the Aviapribor-holding company. Several other navaids and the display system were developed by the Ramenskoye Instrument Design Bureau and other members of the Technocomplex scientific production centre. The navigation system can identify the aircraft’s location independently from satellite positioning and without communicating with ground-based systems The composition of BINSSP1 monoblock and links between functional subunits are presented in Fig. 3. Inertial measurement unit (IMU) contains three LGs and three QAs oriented in orthogonal air craft frame XYZ. ADC synchronously converts the sensor data and auxiliary signals to digital form and generates control signals for the gyro functional electronics. Data exchange rate between ADC and the computer is 2.4 kHz, with complete volume of required data coming to the computer each cycle. A high-performance computer which would solve all the required problems in real time has not yet been created at the development stage, so we had to use two computers. The functions were distributed as follows: the first computer generates the inertial data, controls the ADC, provides embedded control of inertial sub systems and receives external data from the integrated navigation system; the second computer processes inertial and satellite data and checks the validity of satellite data. The secondary power supply (SPS) generates all the required voltages from the board power. The system communicates with the integrated navigation system and other users by the interfaces show The data inputted to the system are the radiofre quency (RF) data from GNSS constellation, projec tions of angular velocity vector and specific force vector on the aircraft axes XYZ, barometric height from the air data system (ADS) and the command “Landing gear compressed” (LGC) generated during the takeoff. The output data include three types of navigation information: inertial, integrated and satellite data. Inertial data are generated from sensor signals by primary processing using the known algorithms [6], with numerical solution of Poisson equation using the ele ments of quaternion algebra . Nondisturbance of horizontal channels is provided using the Schuler tun ing, and of vertical channels, using ADS barometric height. Air speed generated by ADS can significantly differ from the true speed, so this information is not used for damping the vertical of SINS mathematical platform. Primary processing of sensor data includes the electronic compensation for dither effect, account for calibrated bias of gyros and accelerometers, scaling of data signals, correcting the nonorthogonality of sensor sensitive axes, compensation of distance between QA sensitive masses and temperature dependences of these parameters. All preprocessing is performed within the data exchange cycle between ADC and the computer. Using the joint processing of satellite and inertial data, the Kalman filter generates updates for inertial data, estimates the instrument errors not compensated algorithmically, and generates updates in prediction mode. The filter order is set at the step of software debugging and covers all the significant and observable instrument errors, initial alignment error, and data delay in GNSS channel. During the flight, the obtained estimates are used only to generate the ade quate updates in prediction mode and are not applied to update the inertial loop since it can degrade its noise immunity. Integrated navigation data are generated based on inertial data with account for the Kalman filter updates. On the completion of alignment mode, when the true heading is generated using the geographical coordinates by gyrocompassing method, the system automatically enters the navigation mode, then realignment mode is realized when the aircraft is in the airfield (during parking, taxiing or takeoff). In this case zero velocity update of the vertical (in parking mode), or update of the heading, vertical and acceler ometer noncompensated zeroes (in taxiing mode) is performed using the Kalman filter estimates (the mode is selected by analyzing the available data) . It should be noted that during taxiing at the airfield the aircraft is not exposed to the translational air velocity, so the filter estimates the error in true heading. More over, this is a flat and shortterm motion, which makes it impossible to adequately estimate noncompensated gyro drifts as weakly observable parameters. These statements are confirmed by mathematical simulation and testing the real realignment mode . As the air craft lifts off the runway, the realignment mode is com pleted (command “Landing gear compressed”). S-108 communications suite The S-108 communications suite from the Nizhny Novgorod-based Polyot company includes two UHF/VHF radios and a short-wave one and Link-16 datalink capability. The S-108 allows voice and data communication between the aircraft and ground control stations, among aircraft within a mixed package, etc. Automatic data swapping is exercised through the radios’ channels with both voice and data communications being encrypted.  Power Plant The Su-35 is powered by a pair of izdeliye (Product) 117S (AL-41F1S) turbofan engines. Developed jointly by Sukhoi, NPO Saturn and UMPO, The engines are substantially modified AL-31F production engines employing fifth-generation technologies and draws on the design of the fifth-generation PAK FA's Saturn 117 (AL-41F1) engines. They use a new fan, new high and low pressure turbines, and a new digital control system. The modernization has increased the engine special mode thrust by 16%, up to 14,500 kgf. In the maximum burner-free mode it reaches 8,800 kgf. Compared to today’s AL-31F engines, their capabilities will grow substantially, by 2 to 2.7 times. For instance, the between-repair period will grow from 500 to 1,000 hours (the operating period before the first overhaul is 1,500 hours). The designed period will vary between 1,500 and 4,000 hours. Its thrust output is estimated at 142 kN , 20 kN more than the Su-27M's AL-31F. It has a service life of 4,000 hours, compared to the AL-31F's 1,500; the two engines feature thrust-vectoring capability. Each thrust vectoring (TVC) nozzle has its rotational axis canted at an angle, similar to the configuration on the Su-30MKI. The thrust vectoring nozzles operate in one plane for pitch, but the canting allows the aircraft to produce both roll and yaw by vectoring each engine nozzle differently. A similar thrust vectoring system is also implemented on the PAK FA. The engine may give the Su-35 limited supercruise capability, or sustained supersonic speed without the use of afterburners. It features a fan 3% larger in diameter (932 millimetres (36.7 in) versus 905 millimetres (35.6 in)), advanced high- and low-pressure turbines 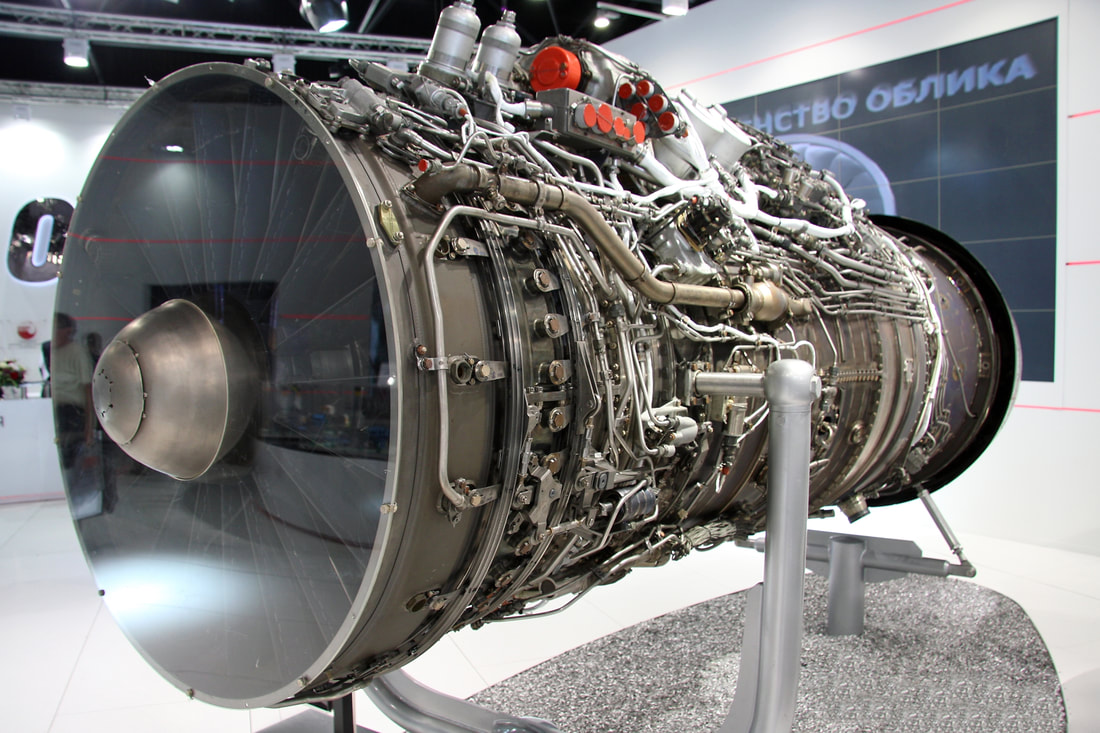 Stealth Su 35 has manged to reduce its RCS better than other Su 27 variants. The improved radar stealth reduces the reflectance of the Su-35 in the X radio waveband and in the angle range of ±60°. Radar-absorbent material is applied to the engine inlets and the front stages of the engine compressor to halve the Su-35's frontal radar cross-section (RCS); the canopy was also modified to deflect radar waves. Stealth measures:
In terms of the thermal signature Sukhoi may have used ceramic materials in parts that reach higher temperatures, such as in the exhaust of the engine.  Electronic Warfare The Su-35 uses the KNIRTI L175M Khibiny-M for this function. It consists of a small torpedo-shaped wingtip pod that covers the aircraft with radio-electronic protective hood once a missile attack has been detected. The protective hood prevents the missile from reaching the target and makes it deviate from the course. This intelligent system creates a digital cloud making the device equipped with Khibiny invisible for enemy radars and guided search heads. This system is similar to the one in the F-18 G and operates on 3 modes:
The system has an individual display in the cockpit and works together with the radar, sending energy to the threats and to the disposable counter-measures , increasing the chance to evade enemy missiles. It also has a MAWS to detect missiles at approach, a RWR , disposable counter-measures such as chaff, flares and in the future towed counter-measures such as the ones in the Eurofighter Typhoon. Khibiny-M consists of the intelligence unit, which captures radiation from radar or air-based air defense, electronic warfare unit also. Part of the system operates at a high frequencies of favorite (wave H and J) and is embedded in the airframe. If necessary, the Su-35 containers can be suspended, which extends the capability of the system due to the addition of the ability to operate at medium wavelengths (E through G). According to KRET corporation the Khibiny increases the aircraft's survivability by 25-30 times. This pod development is the result of the lessons learned during the conflict with Georgia in 2008 where all the aircraft lost were not fitted with an EW system which is the main cause of them being shot down. The Khibiny jamming system was tested successfully for some time on the ground in Buryatia, Russian Federation. The Russian Air Force plans call for the installation of the Khibiny jammer on all its advanced jets such as Su-30SM, Su-30M2, Su-34 and Su-35 (Khibiny-10V). The Khibiny-10V is a version installed internally instead of the wingtips. In Addition to chaff and flare dispencers Su 35 equiped with integrated NPK Of SPP electronic survival system , consisting of series of optical sensors . (SAR and OLO)  Aerosila TA14-130-35 gas-turbine auxiliary power unit (APU) TA14-130-35 is a state-of-the-art gas-turbine engine with the power up to 105 kW. This engine is designed for SU-35 aircraft APU. It is used for supplying on-board AC electric power 200/115 V, up to 30 kV and providing air conditioning for cockpit and cabin. The engine is equipped with a highly efficient turbo compressor and integrated system of oil cooling. As a result, fuel consumption and the weight are reduced. The engine is compliant with the contemporary engineering requirements and is equipped with a full-authority electronic digital control system that provides regulation, control and error detection as well as operating time count. Technical features:
 Phazotron N-012 The fuselage tailboom was extended and enlarged to fit the N012 tail warning radar, although the Russians never disclosed how many aircraft were equipped with this equipment. A tail warning radar was a short-lived class of aircraft-mounted radar systems used to provide warning of another aircraft approaching from the rear.  HUD In the field of military aviation, the head-up display allows the pilot to monitor his environment together with information provided by his instruments. This method consists of superimposing information necessary for piloting, navigation or the realization of the mission, on the external environment, by means of a small projector displaying the image on one or more semi-transparent mirrors System uses diffraction in a specially prepared transparent material. It has a wide 20°x30° field of view.  Zvesda K-36D-5 zero-zero ejection seat In flight, a crewmember is held in the seat with a suspension/restraint harness system. The crewmember may be restrained in the seat with the shoulder and waist restraint mechanisms. The seat features stepless height adjustment, which makes the seat occupation comfortable for work and vision. The crewmember protection against the dynamic pressure G-loads at ejection is provided with the protective gear, windblast shield, forced restraint in the seat, seat stabilization as well as the selection of one of three operation modes for the energy source depending on the suited pilot mass. At the aircraft speed exceeding 850 km/h, the MRM steady-state mode is adjusted by the automatics depending on the acceleration. After automatic separation of the pilot from the seat, the recovery parachute canopy is inflated providing the pilot’s safe descent. A portable survival kit, which is separated from the seat together with the pilot, supports his/her vital functions after landing or water landing, makes the pilot search easier, and the PSN-1 life raft supports the pilot floatation on the surface of water. In comparison with the К-36D-3,5 seat, the К-36D-5 ejection seat has improved operating characteristics:
Specifications: The К-36D-5 ejection seat realizes the crewmember emergency escape within the range of equivalent airspeed (VE.) from 0 to 1300 km/h, at Mach number up to 2.5 and aircraft flight altitude from 0 to 20,000 m, including takeoff, landing run and «Н=0, V=0» mode. The seat is used with the KKO-15 set of protective gear and oxygen equipment. Seat installation mass does not exceed 100 kg, including the survival kit.  KS – 129The KS -129 oxygen system is designed to provide one or two pilots of the front-line aircraft with oxygen during flights at the altitudes up to 20 km. (KS -130 oxygen system is used at the altitudes up to 12 km). The oxygen source is the BKDU -130 onboard oxygen-generating system, which produces oxygen from compressed air tapped from the aircraft gas turbine compressor. Major advantages of the bottle-free oxygen system:
 ZSh-7ap -HMD Based on the original ZSh-7 design of 1987, it was introduced in 1990. Worn by pilots flying SU-27's and MiG-29's, it is equipped with a bracket where a Night Vision Equipment (NVE) or Sh-3UM-1 target designator is fitted. Those devices allow the pilot to fire Air to Air missiles locking on targets by looking at them. The ZSh-7 uses, as the ZSh-3 and -5, an occipital bladder to tighten the pilot's face to the KM-34 Series 2 oxygen mask during High "G" maneuvers. It has anti-jamming communications system integrates low impedance.  N036B-1-01 Su 35 also carries N036B-1-01 X-band AESA radars with 358 T/R modules embedded in the wings leading edge for increased angular coverage.  Performance and Characteristics
Rohit
5/21/2018 12:23:44 am
Get job in mechanical cad designer Nx-UG 12/20/2021 01:35:02 pm
R-40 missile is exclusive to MiG-25, Flanker family never carried R-60s, and all Flankers after the Su-27S could only carry 2x R-27(E)T, the Su-35 however can carry max 4x R-27(E)T
Aviator77
5/25/2023 01:39:54 am
Will correct some wrong data and info .
Aviator77
5/25/2023 04:29:39 am
About radar,it is not Irbis-E but Irbis ( N035 Irbis) and it is for Russian Su-35S, N035E Irbis-E is for exported Su-35. X band N035 Irbis has two TWT's ,one the main with average power in HPRF mode of 5kW's and with max pulse power in HPRF mode of 20kW's. Secondary TWT has average power in HPRF mode of 2kW's. Wiki -data are wrong and receive unit has much better noise figure ( much less then 3.5dB's). Irbis is in fact hybrid ESA and as PESA has many abilities of AESA. Reflector of the antenna with diameter of 900mm and with almost 1800 TRE uses hybrid-heterodyne waveguide system which enables sending multible beams/signals with differ working frequencies and differ waveform. just like any AESA.Reflector of the antenna has gyro-stabilised two-step electro-hydro gymball for movements left to right and for roll .Irbis can detect/track aircraft with RCS of 0.01sqm(VLO -aircraft) at 100kms,0.1sqm (LO -aircraft) at 160-180kms, 1sqm from 270kms and 3sqm from 400kms. E.g. 5th gen stealth fighter F-22A Raptor (RCS in X band 0.1sqm) can be detected from about 180kms in front angle aspect as it was on Dec.13 2017 in eastern Syria.
Googleplex
10/28/2023 07:09:30 am
Hi my man, how are you? I think he said that the Su-35 has a 0.01 SAR resolution at 90km per NIIP.
SU-35S
10/28/2023 07:33:12 am
Where do you get this information may I ask? Specially about the SAR radar. IDK where u even get that?
Googleplex
10/28/2023 08:37:07 am
The Su-35S has a Synthetic aperture radar resolution of 1m2 at distance of 200Km per manufacturer. Leave a Reply. |
AuthorPalash Choudhari Archives
April 2021
Categories
All
|
 RSS Feed
RSS Feed
